
[Isaac Sim Tutorial #2] Ch.2 나만의 첫 로봇 만들기: 기본 도형 & 물리 적용

안녕하세요! Isaac Sim 정복기, 드디어 두 번째 시간입니다. 지난 시간에는 바닥과 조명을 설치해서 '기초 세트장'을 만들었죠? 오늘은 그 위에서 뛰어놀 나만의 로봇(Body + Wheels)을 직접 조립해 보겠습니다.
🛑 잠깐! 아직 1장을 안 보셨나요?
Isaac Sim은 기초 환경 세팅이 안 되어 있으면 이번 실습을 진행할 수 없습니다. 물리 법칙이 적용된 바닥(Ground Plane)과 조명이 없다면 로봇이 허공으로 떨어지거나 깜깜해서 안 보일 수 있어요.
아직 1장 실습을 안 하셨다면, 아래 링크를 통해 공부를 하고 돌아오세요!
👉 [Isaac Sim Tutorial #1] Ch.1 기초 환경 세팅: Stage, Physics, Lighting 설정하기
[Isaac Sim Tutorial #1] Ch.1 기초 환경 세팅: Stage, Physics, Lighting 설정하기
[Isaac Sim Tutorial #1] Ch.1 기초 환경 세팅: Stage, Physics, Lighting 설정하기 안녕하세요! Isaac Sim 정복기, 그 첫 번째 챕터입니다.혹시 아직 Isaac Sim 설치를 안 하셨나요? 설치가 안 되어 있다면 실습을 진
dt-simulation.tistory.com
세팅이 완료되셨다면, 이제 본격적으로 움직이는 로봇을 만들어 볼까요? 단순히 모양만 만드는 게 아니라, 물리 속성(Physics)을 입혀서 중력에 의해 떨어지고 부딪히게 만드는 것이 오늘 핵심입니다.
1. 로봇의 몸통(Body) 만들기
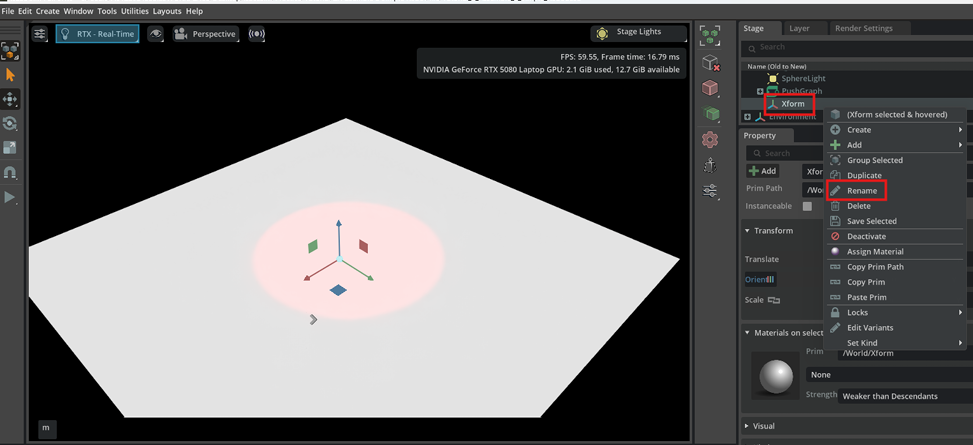
로봇의 뼈대가 될 몸통부터 만듭니다. 우리는 관리를 편하게 하기 위해 Xform이라는 빈 컨테이너를 먼저 만들고 부품을 채워 넣는 방식을 쓸 겁니다.
- Xform 생성: 빈 공간에 우클릭 후 Create > Xform을 선택합니다.
- 이름을 **body**로 변경합니다.
- 우측 Property 탭에서 Translate 값을 (0, 0, 1)로 설정해 바닥에서 살짝 띄워줍니다.

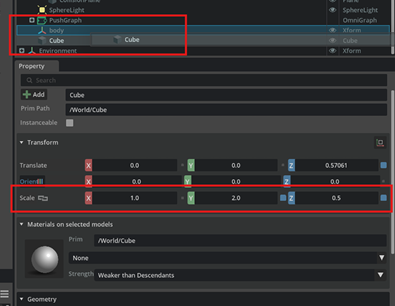
- 도형 추가 (Cube): 상단 메뉴바에서 Create > Shape > Cube를 눌러 큐브를 만듭니다.

- 크기 및 구조 정리:
- Cube의 Scale을 (1, 2, 0.5)로 변경하여 납작하고 길쭉한 몸통 모양을 잡습니다.
- 만들어진 Cube를 드래그하여 아까 만든 body Xform 안으로 넣어줍니다(Parenting).
2. 양쪽 바퀴(Wheels) 달기
몸통만 있으면 움직일 수 없죠? 원기둥(Cylinder)을 활용해 바퀴를 달아줍시다.
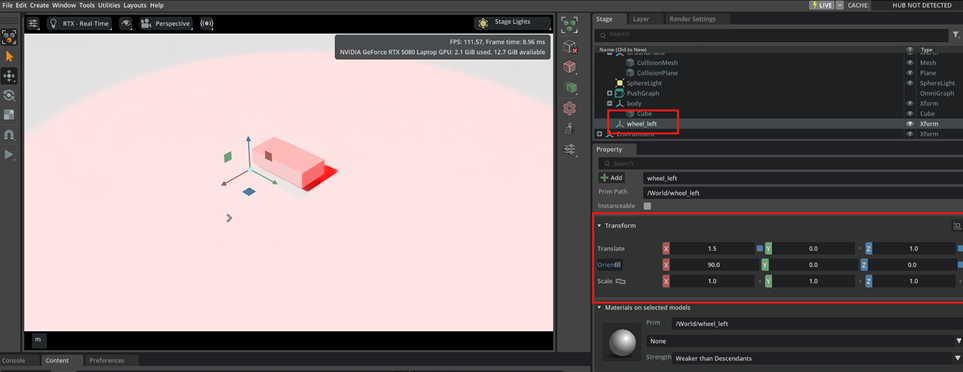
- 왼쪽 바퀴 틀 (Xform):
- 다시 Create > Xform을 만들고 이름을 [wheel_left] 로 바꿉니다.
- 위치와 회전을 잡습니다: Translate (1.5, 0, 1), Orient (90, 0, 0) (X축 기준 90도 회전시켜 바퀴 모양으로 세웁니다).
- 원기둥 추가 (Cylinder):
- Create > Shape > Cylinder를 생성합니다.
- 크기를 조절합니다: Radius(반지름) 0.5, Height(높이) 1.0.
- 이 Cylinder를 wheel_left Xform 안에 넣고 이름도 wheel_left로 정리합니다.
- 오른쪽 바퀴 복제 (꿀팁!):
- wheel_left를 우클릭하고 Duplicate를 선택합니다.
- 복제된 바퀴의 위치(Translate X)만 [-1.5] 로 바꿔 반대편으로 보냅니다.
- 이름을 [wheel_right]로 변경하면 양쪽 바퀴 완성!.


3. 생명 불어넣기: 물리 속성 (Physics Properties)
지금까지 만든 로봇은 겉모습만 있는 '껍데기'입니다. 플레이 버튼을 눌러도 허공에 둥둥 떠 있을 뿐이죠. 물리 엔진이 인식할 수 있도록 속성을 부여해 봅시다.
- 전체 선택: Cube(몸통)와 양쪽 Cylinder(바퀴)까지 3개의 객체를 모두 선택합니다 (Shift 키 활용)
- Rigid Body 적용: 우측 Property 탭에서 + Add > Physics > Rigid Body with Colliders Preset을 선택합니다.
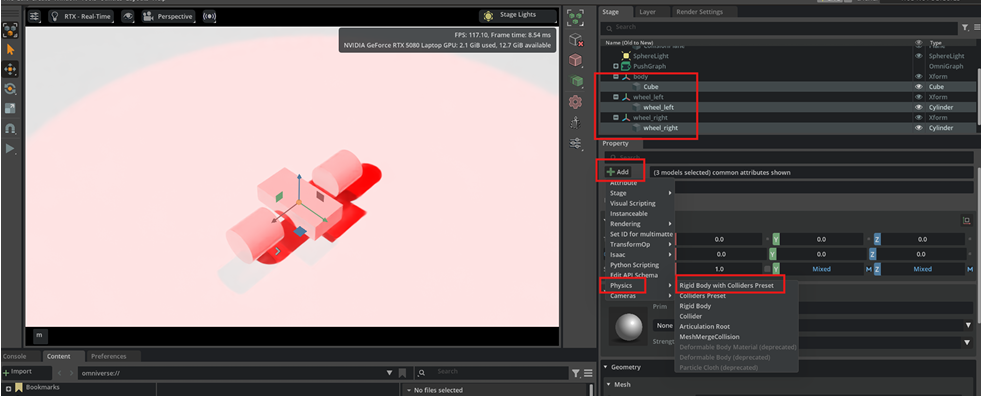
👉 이게 무슨 뜻인가요? 이제 이 물체들은 **질량(Mass)**을 가지며, **중력(Gravity)**의 영향을 받아 바닥으로 떨어지고 서로 **충돌(Collision)**하게 된다는 뜻입니다.
4. 색깔 입히기: 재질 (Material)
마지막으로 로봇의 성능(마찰)과 디자인(색상)을 설정해 봅니다.
A. 물리 재질 (Physics Material) 바퀴가 미끄러지지 않고 땅을 박차고 나가려면 마찰력이 필요합니다
- Create > Physics > Physics Material을 선택해 재질을 생성합니다.
- 생성된 재질 속성에서 Friction(마찰 계수) 등을 조절합니다.
- 적용할 바퀴를 선택하고, Property 탭의 Materials on Selected Model 항목에서 방금 만든 재질을 연결합니다.


B. 시각 재질 (Visual Material) 밋밋한 흰색 로봇에 색을 입혀봅시다.
- Create > Materials > OmniPBR을 클릭해 재질을 두 개 만듭니다 (하나는 몸통용, 하나는 바퀴용).

- 각 재질의 Albedo (Main Color)를 원하는 색상으로 변경합니다.

- 각각의 부품에 해당 재질을 연결해 주면, 알록달록한 나만의 로봇 완성!.

🎉 2장 마무리: 플레이 버튼을 눌러보세요!
이제 좌측 툴바의 Play 버튼을 눌러보세요. 로봇이 중력에 의해 자연스럽게 바닥으로 쿵! 하고 착지하는 모습을 볼 수 있습니다.

오늘 우리는 Isaac Sim의 핵심인 Xform 구조화와 Rigid Body 적용법을 배웠습니다. 이것만 알아도 시뮬레이션의 절반은 시작한 셈입니다.
다음 3장 예고: 떨어지기만 하고 움직이지 못하니 답답하시죠? 다음 시간에는 이 바퀴에 관절(Joint)을 달아 실제로 주행(Drive)까지 시켜보겠습니다.
도움이 되셨다면 공감과 댓글 부탁드려요! (질문은 언제든 환영입니다 😊)
[Isaac Sim Tutorial #3] Ch.3 로봇 움직이기: Joint, Drive, ActionGraph 연결
[Isaac Sim Tutorial #3] Ch.3 로봇 움직이기: Joint, Drive, ActionGraph 연결 안녕하세요! Isaac Sim 정복기 세 번째 시간입니다. 지난 Ch.2에서 우리는 로봇의 몸통과 바퀴를 만들고 물리 속성(Rigid Body)까지 입혔
dt-simulation.tistory.com